本文面向有一定 C++ 基础的开发者,系统梳理内联的原理、使用场景、编译器行为与实战陷阱,助你写出更快、更优雅的现代 C++ 代码。
一、什么是内联?为什么它重要
函数调用在汇编层面并不"免费"。每次调用都涉及:
对于一个仅执行两三条运算的...
C++内联函数实战:宏定义替代者,性能优化必知
本文面向有一定 C++ 基础的开发者,系统梳理内联的原理、使用场景、编译器行为与实战陷阱,助你写出更快、更优雅的现代 C++ 代码。
一、什么是内联?为什么它重要
函数调用在汇编层面并不"免费"。每次调用都涉及:
对于一个仅执行两三条运算的小函数,这些开销可能远超函数体本身。内联() 是编译器将函数体直接展开到调用点的优化手段,从而消除调用开销,并为后续的常量折叠、死代码消除等优化打开大门。
// 未内联时,每次调用 add() 都有函数调用开销
int add(int a, int b) {
return a + b;
}
int result = add(3, 4); // 产生 call 指令
// 内联后,编译器直接将函数体展开
// int result = 3 + 4; → 编译期直接得到 7
内联不仅仅是"速度更快"这么简单,它是现代 C++ 高性能编程的基石之一。
二、 关键字:你以为你懂,其实你不懂2.1 的真实含义
很多开发者误以为加上 就等于"强制内联"。实际上, 关键字在 C++ 标准中的主要作用是允许在多个翻译单元中重复定义,而不是告诉编译器"请把这个函数内联"。
// math_utils.h
inline int square(int x) {
return x * x;
}
上面的 关键字的核心意义是:允许该函数定义出现在多个 .cpp 文件中(通过 #),而不违反 ODR(One Rule,单一定义规则)。
编译器完全可以忽略 建议,对一个 函数不做内联处理;同样,也可以对没有 标记的函数执行内联优化。
2.2 编译器才是内联的真正决策者
现代编译器(GCC、Clang、MSVC)都有自己的内联启发式策略,主要考量因素包括:
// 即使不写 inline,编译器在 -O2 下也会内联这种小函数
int clamp(int v, int lo, int hi) {
return v < lo ? lo : v > hi ? hi : v;
}
2.3 强制内联与禁止内联
当你明确需要控制内联行为时,可以使用编译器扩展:
// GCC / Clang:强制内联
__attribute__((always_inline)) inline int fast_abs(int x) {
return x < 0 ? -x : x;
}
// MSVC:强制内联
__forceinline int fast_abs(int x) {
return x < 0 ? -x : x;
}
// 跨平台宏封装(推荐做法)
#if defined(_MSC_VER)
#define FORCE_INLINE __forceinline
#elif defined(__GNUC__) || defined(__clang__)
#define FORCE_INLINE __attribute__((always_inline)) inline
#else
#define FORCE_INLINE inline
#endif
FORCE_INLINE int fast_abs(int x) {
return x < 0 ? -x : x;
}
// 禁止内联(GCC/Clang)
__attribute__((noinline)) void debug_print(const char* msg) {
fprintf(stderr, "[DEBUG] %s\n", msg);
}
三、类成员函数的内联3.1 类内定义自动成为内联候选
在类体内定义的成员函数,编译器默认将其视为内联候选,无需显式写 :
class Vector2D {
public:
float x, y;
// 类内定义 → 隐式 inline 候选
float length() const {
return std::sqrt(x * x + y * y);
}
// 类内声明,类外定义 → 需要显式 inline(若在头文件中定义)
float dot(const Vector2D& other) const;
};
// 在头文件中类外定义,必须加 inline 避免 ODR 违规
inline float Vector2D::dot(const Vector2D& other) const {
return x * other.x + y * other.y;
}
3.2 析构函数与虚函数的内联限制
虚函数在通过虚表调用时无法被内联,因为调用目标在运行时才能确定:
class Base {
public:
virtual ~Base() = default;
// 通过虚表调用时不能内联
virtual int compute(int x) {
return x * 2;
}
};
class Derived : public Base {
public:
int compute(int x) override {
return x * 3;
}
};
void process(Base* obj) {
// 虚表调用,无法内联
int result = obj->compute(10);
// 若类型已知,编译器可进行去虚化(devirtualization)并内联
Derived* d = dynamic_cast(obj);
if (d) {
int r2 = d->compute(10); // 可能被内联
}
}
四、模板与内联:天然的内联工厂
模板函数和类模板的成员函数,其定义必须在头文件中对所有翻译单元可见,这使得它们天然具备内联展开的条件。
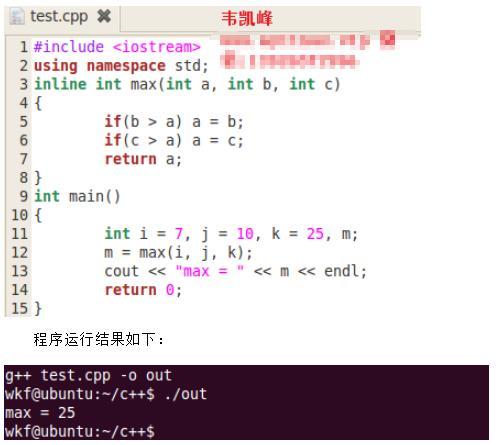
4.1 函数模板的内联特性
// 头文件中定义模板函数,每个实例化都是独立的内联候选
template
T max_val(T a, T b) {
return a > b ? a : b;
}
// 使用场景
int i = max_val(3, 5); // 实例化 max_val,极可能被内联
float f = max_val(1.5f, 2.5f); // 实例化 max_val,极可能被内联
4.2 函数:编译期内联的极致
函数要求编译器在编译期求值(当参数为常量时),这是内联的终极形态——不仅消除了运行时调用开销,甚至消除了运行时计算本身:
constexpr int factorial(int n) {
return n <= 1 ? 1 : n * factorial(n - 1);
}
// 编译期直接得到结果,运行时零开销
constexpr int val = factorial(10); // 编译期计算得 3628800
// 运行时也可调用(此时行为类似普通内联函数)
int runtime_n = 5;
int result = factorial(runtime_n); // 运行时计算
4.3 if :编译期分支消除
template
auto process(T value) {
if constexpr (std::is_integral_v) {
// 整型分支,非整型时此代码块被完全消除
return value * 2;
} else if constexpr (std::is_floating_point_v) {
// 浮点分支
return value * 2.0;
} else {
// 其他类型
return value;
}
}
五、 表达式与内联
本质上是编译器生成的匿名函数对象(),其 () 是内联候选。这也是 STL 算法配合 使用时性能极高的原因之一。
5.1 的内联优势
#include
#include
std::vector data = {5, 3, 8, 1, 9, 2};
// lambda 的 operator() 会被内联到 sort 的比较逻辑中
std::sort(data.begin(), data.end(), [](int a, int b) {
return a < b;
});
// 对比:函数指针版本通常无法内联(运行时间接调用)
bool cmp(int a, int b) { return a < b; }
std::sort(data.begin(), data.end(), cmp); // 可能无法内联
5.2 立即调用 (IIFE)模式
立即调用的 表达式(IIFE, )是一种优雅的局部代码封装方式,同时享有内联优化:
// 复杂初始化逻辑封装为 IIFE,既清晰又不影响性能
const auto config = [&]() -> Config {
Config cfg;
cfg.width = read_env("WIDTH", 800);
cfg.height = read_env("HEIGHT", 600);
cfg.title = read_env("TITLE", "App");
return cfg;
}(); // 注意末尾的 () 立即调用
// 避免多次条件判断的技巧
const std::string label = [&]() -> std::string {
if (score >= 90) return "优秀";
if (score >= 75) return "良好";
if (score >= 60) return "及格";
return "不及格";
}();
六、内联与链接属性:ODR 违规的坑6.1 非内联函数在头文件中定义的危险
// utils.h —— 危险!
// 若此函数被多个 .cpp 包含,将触发链接错误(重复定义)
int add(int a, int b) { // 缺少 inline
return a + b;
}
// 正确做法
inline int add(int a, int b) { //
return a + b;
}
6.2 匿名命名空间与 的替代方案
如果你希望函数在每个翻译单元中独立存在(不共享),可以使用 或匿名命名空间,但这会增加代码体积:
// 每个包含此头文件的翻译单元都有独立副本
namespace {
int helper(int x) {
return x + 1;
}
}
// 等价的 static 写法(C 风格,不推荐在 C++ 中使用)
static int helper(int x) {
return x + 1;
}
七、实战场景:哪些函数值得内联7.1 适合内联的场景
场景一:频繁调用的小型访问器(/)
class Particle {
float _x, _y, _z;
float _mass;
public:
// 这类函数调用上百万次,内联收益极大
float x() const { return _x; }
float y() const { return _y; }
float z() const { return _z; }
float mass() const { return _mass; }
void set_position(float x, float y, float z) {
_x = x; _y = y; _z = z;
}
};
场景二:数学运算工具函数
FORCE_INLINE float lerp(float a, float b, float t) {
return a + (b - a) * t;
}
FORCE_INLINE float smoothstep(float edge0, float edge1, float x) {
float t = std::clamp((x - edge0) / (edge1 - edge0), 0.0f, 1.0f);
return t * t * (3.0f - 2.0f * t);
}
// 在渲染循环中,这些函数每帧可能调用数百万次
for (int i = 0; i < pixel_count; ++i) {
output[i] = lerp(src_a[i], src_b[i], alpha[i]);
}
场景三:策略类/比较器
struct CaseInsensitiveLess {
// operator() 内联后,map 的查找性能大幅提升
bool operator()(const std::string& a, const std::string& b) const {
return std::lexicographical_compare(
a.begin(), a.end(),
b.begin(), b.end(),
[](char ca, char cb) {
return std::tolower(ca) < std::tolower(cb);
}
);
}
};
std::map registry;
7.2 不适合内联的场景
场景一:函数体较大,调用次数不多
// 200 行的复杂解析函数,内联只会导致代码膨胀
// 不要加 inline 或 FORCE_INLINE
void parse_json_object(const char* input, size_t len, JsonNode& out) {
// ... 大量解析逻辑 ...
}
场景二:包含复杂控制流或异常处理
// 含有 try-catch 的函数,内联收益极低,且会增加调用方代码体积
// 通常不建议强制内联
std::string read_file(const std::string& path) {
try {
std::ifstream ifs(path);
if (!ifs) throw std::runtime_error("无法打开文件: " + path);
return {std::istreambuf_iterator(ifs), {}};
} catch (const std::exception& e) {
log_error(e.what());
return {};
}
}
场景三:递归函数(通常无法内联)
// 递归函数无法完全内联(循环递归展开除外)
// 编译器可能做有限次展开,但不要依赖此行为
int fibonacci(int n) {
if (n <= 1) return n;
return fibonacci(n - 1) + fibonacci(n - 2);
}
八、内联与代码膨胀(Code Bloat)
内联是一把双刃剑。过度内联会导致:
指令缓存(I-Cache)命中率下降:代码体积增大,热点代码难以全部驻留在 L1 指令缓存(通常 32KB)中。编译时间增加:大量内联展开增加了编译器的工作量。调试难度上升:内联函数在调试器中难以设置断点和追踪调用栈。
// 反例:强制内联一个较大的函数,且在循环中大量调用
// 这会使循环体膨胀,反而降低 I-Cache 效率
FORCE_INLINE void process_event(const Event& e) {
// 50+ 行的处理逻辑
validate_event(e);
log_event(e);
dispatch_to_handler(e);
update_statistics(e);
// ...
}
for (const auto& event : event_queue) {
process_event(event); // 循环体被大量代码填充,I-Cache 压力大
}
黄金法则:内联函数体最好不超过 10 条语句(非严格,视情况而定)。
九、用 指导内联决策
不要凭直觉决定内联,要用数据说话。
9.1 使用编译器报告查看内联情况
# GCC:生成内联报告
g++ -O2 -finline-limit=100 -fopt-info-inline=inline_report.txt main.cpp
# Clang:使用 -Rpass 查看优化报告
clang++ -O2 -Rpass=inline main.cpp
# 查看反汇编确认内联效果
g++ -O2 -S -o main.s main.cpp
9.2 典型性能对比示例
#include
// 非内联版本
__attribute__((noinline))
double compute_noinline(double x) {
return x * x + 2.0 * x + 1.0;
}
// 内联版本
FORCE_INLINE double compute_inline(double x) {
return x * x + 2.0 * x + 1.0;
}
static void BM_NoInline(benchmark::State& state) {
double sum = 0.0;
for (auto _ : state) {
for (int i = 0; i < 1000; ++i)
sum += compute_noinline(static_cast(i));
}
benchmark::DoNotOptimize(sum);
}
static void BM_Inline(benchmark::State& state) {
double sum = 0.0;
for (auto _ : state) {
for (int i = 0; i < 1000; ++i)
sum += compute_inline(static_cast(i));
}
benchmark::DoNotOptimize(sum);
}
BENCHMARK(BM_NoInline);
BENCHMARK(BM_Inline);
BENCHMARK_MAIN();
在 -O2 下, 版本通常会快 20%~50%,甚至在循环向量化后差距更大。
十、现代 C++ 中的内联变量(C++17)
C++17 引入了 变量,允许在头文件中定义全局变量或类静态成员变量,而不违反 ODR:
// config.h
struct AppConfig {
// C++17 inline 静态成员变量,无需在 .cpp 文件中单独定义
static inline int max_connections = 100;
static inline std::string version = "1.0.0";
};
// 全局 inline 变量
inline constexpr double PI = 3.14159265358979323846;
inline constexpr double TAU = 2.0 * PI;
// 使用
double circumference = TAU * radius; // 编译期常量折叠
这在编写 -only 库时极为有用,彻底消除了"在头文件中只能声明不能定义"的历史限制。
十一、综合实例:构建高性能数学向量库
将以上技巧综合运用,展示一个生产级向量库的关键部分:
#pragma once
#include
#include
// 跨平台强制内联宏
#if defined(_MSC_VER)
#define VEC_INLINE __forceinline
#else
#define VEC_INLINE __attribute__((always_inline)) inline
#endif
template
struct Vec3 {
T x, y, z;
// 构造函数内联
VEC_INLINE Vec3() : x(0), y(0), z(0) {}
VEC_INLINE Vec3(T x, T y, T z) : x(x), y(y), z(z) {}
// 运算符重载全部内联,避免每次向量运算产生函数调用
VEC_INLINE Vec3 operator+(const Vec3& rhs) const {
return {x + rhs.x, y + rhs.y, z + rhs.z};
}
VEC_INLINE Vec3 operator-(const Vec3& rhs) const {
return {x - rhs.x, y - rhs.y, z - rhs.z};
}
VEC_INLINE Vec3 operator*(T scalar) const {
return {x * scalar, y * scalar, z * scalar};
}
VEC_INLINE Vec3& operator+=(const Vec3& rhs) {
x += rhs.x; y += rhs.y; z += rhs.z;
return *this;
}
// 点积
VEC_INLINE T dot(const Vec3& rhs) const {
return x * rhs.x + y * rhs.y + z * rhs.z;
}
// 叉积
VEC_INLINE Vec3 cross(const Vec3& rhs) const {
return {
y * rhs.z - z * rhs.y,
z * rhs.x - x * rhs.z,
x * rhs.y - y * rhs.x
};
}
// 长度平方(避免开方,用于比较时更快)
VEC_INLINE T length_sq() const {
return dot(*this);
}
// 单位化
VEC_INLINE Vec3 normalized() const {
T len = std::sqrt(length_sq());
assert(len > static_cast(1e-10));
T inv = static_cast(1) / len;
return {x * inv, y * inv, z * inv};
}
};
// 常用类型别名
using Vec3f = Vec3;
using Vec3d = Vec3;
// 全局辅助函数,同样内联
template
VEC_INLINE Vec3 lerp(const Vec3& a, const Vec3& b, T t) {
return a + (b - a) * t;
}
// 使用示例
void simulate_physics(Vec3f* positions, Vec3f* velocities,
const Vec3f* forces, float dt, int count) {
for (int i = 0; i < count; ++i) {
// 所有向量运算均被内联,整个循环可被编译器向量化(SIMD)
velocities[i] += forces[i] * dt;
positions[i] += velocities[i] * dt;
}
}
由于所有运算符都被内联,编译器能"看穿"整个 循环,将其自动向量化为 SIMD 指令(SSE/AVX),获得 4x~8x 的加速。这正是内联最重要的隐性价值:为编译器的高级优化铺路。
十二、总结:内联的使用哲学
内联不是银弹,也不是可以随意堆砌的优化手段。真正有效的内联策略应该遵循以下原则:
让编译器做主:在 -O2 及以上优化级别下,编译器的内联判断往往比人更准确。不要盲目添加 或 。
为热路径服务:只对在性能分析()中确认是瓶颈的小函数强制内联。20% 的代码贡献了 80% 的运行时间,精准优化才是正道。
拥抱现代语法:、if 、、模板——这些现代 C++ 特性与内联天然契合,应优先采用。
警惕代码膨胀:内联大函数会污染指令缓存,适得其反。用 (()) 显式排除不应内联的函数。
测量,再优化:用 、perf、Vtune 等工具验证内联的实际收益,让数据说话,拒绝盲目优化。
内联,本质上是在告诉编译器:"我信任你,帮我把这段逻辑融入调用者的上下文,让你的优化引擎全力施展。" 理解这一点,才能真正写出高性能的现代 C++ 代码。
内联 int return 函数 const inline
热门文章
-

杭州文海实验多名学生流鼻血,官方连夜成立联合工作组彻查工厂排放
-

万茜颜值进阶史:从青涩到“清冷系天花板”的蜕变之路
-

杨少华遗体告别仪式:亲友送别,赵本山送花圈,杨威杨议忙后事
-

长江商学院自创办第一天起 始终以为中国和世界培养一批具有全球视野
-

深圳南山区“美澳口腔”诊所“跑路”风波:数百患者维权,交款种牙却陷入困境
-

“超级工程”渐行渐近,重庆破局,宜昌“躺赢”?
-
国务院总理李强在天津出席2025年夏季达沃斯论坛工商界代表座谈会
-

首份2025年中报周二亮相,12家公司净利润预增超10倍,华银电力暂居榜首
-

电脑恢复出厂设置步骤详解:备份数据及各操作要点
-

十三岁的星辰:云南女孩侯静怡短暂而明亮的一生
-

广州英华思力足球俱乐部翻译徐进遭日籍教练霸凌猝死,家属讨公道
-
巨子生物“变卦”背后:胶原蛋白检测风波与医美巨头商战